Demo 4
See the description here: https://github.com/MandyMeindersma/Robotics/blob/master/Demos/Demo4/Demo4Description.pdf
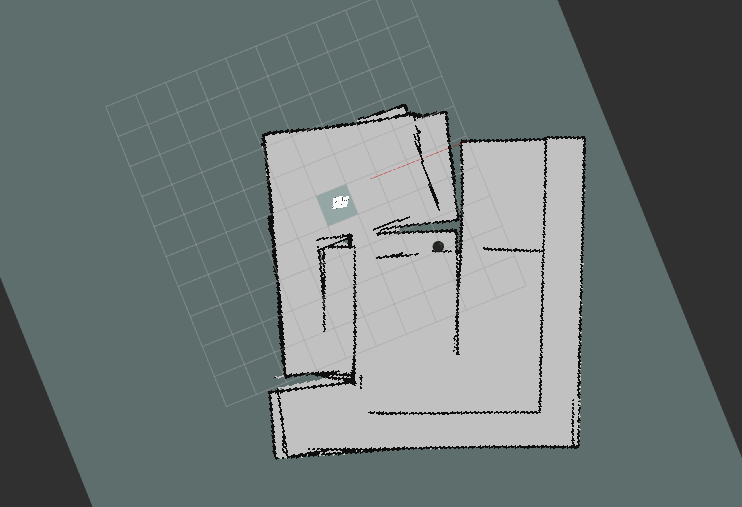
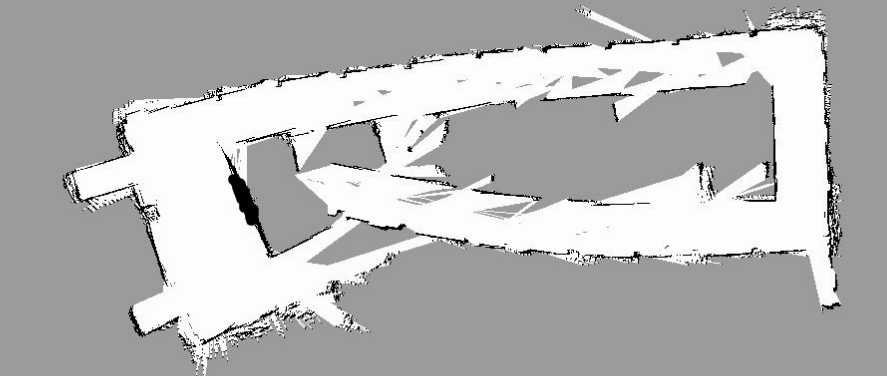
These photos are screen shots of different maps that gmapping created using the same bag file and the same parameters. The simulator adds noise which creates the differences in the maps.
Code for part 1:
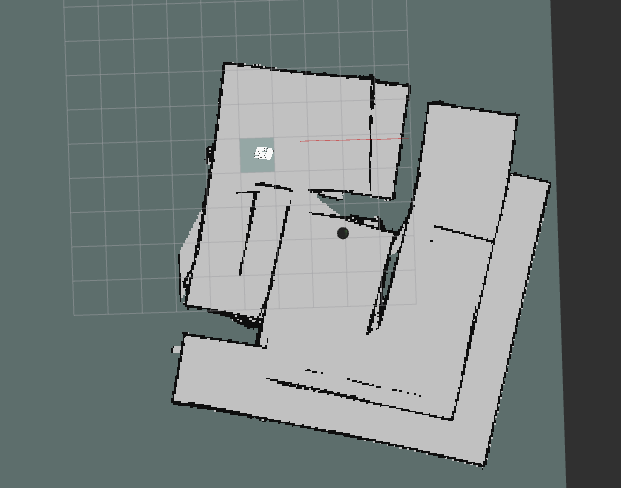
Part 2:
This was our map generated by our robot driving with the same parameters given in part 1